
Development of Drilling Optimization Models for Autonomous Rotary Drilling Systems
- Kingsley Amadi
- Ibiye Iyalla
- 358-365
- Jul 30, 2024
- Engineering
Development of Drilling Optimization Models for Autonomous Rotary Drilling Systems
1,2*Kingsley Amadi and 2Ibiye Iyalla
1College of Engineering, Australian University, Kuwait.
2School of Engineering, Robert Gordon University Aberdeen, UK
DOI: https://doi.org/10.51244/IJRSI.2024.1107026
Received: 27 May 2024; Revised: 24 June 2024; Accepted: 26 June 2024; Published: 30 July 2024
ABSTRACT
The growing global energy demand and strict environmental policies, motivates the use of technology and performance improvement techniques in drilling operations. In the traditional drilling method, parameter optimization depends on the effectiveness of human-driller. Although existing work has identified the significance of upscaling from manual drilling to autonomous drilling system, but little has been done to support this transition. This work presents optimization models for an autonomous rotary drilling system, controlled by a self-tuning, multivariant controller that uses machine learning optimization strategy. The method determines the drilling medium from real-time measurement by estimating the unconfined compressive strength (UCS) from the latest data uploaded via the mud pulse telemetry (MPT) and adjust optimal setpoint based on model output. In the study, four machine learning algorithms were used to predict UCS including artificial neutral network (ANN), Category boast (CB), Support vector machine (SVR) and Randon Forest. Whilst Physics based empirical models with ANN were used to predict the drill rate. Results showed that machine learning (ML) application improves the prediction quality of drill rate and UCS with ANN and Catboast as best ML predictors. The coefficient of determination (R2) of 0.95 ROP prediction and (R2) for test dataset of 0.77 and 070 for UCS prediction using ANN and Catboast respectively. The Q-learning algorithm which uses the value function to search for optimal operating parameter at different Lithologies through dynamic programming, returns decisions for optimal drill rate at respective drilling states consequently improving the efficiency of rotary drilling process in terms of cost and time
Index Terms: Autonomous drilling system, Machine Learning, artificial neural networks, reinforcement learning
INTRODUCTION
Oil and gas are commonly found in sedimentary rocks enclosed within a geologic trap. Drilling a borehole is the only way to harness the hydrocarbon deposited several thousands of feet beneath the subsurface (Amadi etal.2023). Boreholes are drilled using a drilling rig that hoist and rotate the drillstring and the drillbit. The lower part of the drillstring is commonly referred as the bottom hole assembly (BHA). Initially the BHA hangs in tension with the support of the hoisting hook which also support the top drive (Šprljan et’al.2020). The total weight suspended by hook is referred to as the hook load (HL). The sequence of rotary drilling begins with breaking circulation by increasing the pump strokes until the desired flowrate, then established rotation by increasing the rotary speed of the topdrive until the desired rotary speed in revolution per minute (RPM) (Akgun 2002). The drilling process progresses by lowering the drillstring in the borehole using the drawwork hoisting system by the driller as shown in Fig.1a. When the drill bit contacts the bottom of the borehole, a proportion of the drillstring weight is transferred to the rock-bit interface as the drillbit penetrates the formation. The amount of load transferred is commonly referred to as the weight on bit (WOB) measured in pounds (lbs) (Amadi et.al 2022). Similarly, the torque required to turn the drillstring whilst off bottom is referred to as the off-bottom torque while the torque drilled to turn the drillstring with the bit on bottom is referred to as the on bottom torque (TOB). The rate of penetration rate is a dependent variable that is influenced by several variables such as WOB, RPM, flowrate, and other variables (Bani-Mustafa et.al.2021). When the rate at which the drillstring is lowered at surface, go above the rate of drillbit penetration the WOB increases until the state of equilibrium is attained. When both the rate of drillstring descent and drillbit ROP become identical.
The simultaneous rotary action of the top-drive and the application of axial force by the drawworks hoist, facilitates drill string longitudinal motion, thereby establishing drill bit normal force which cuts the rock material, and the resulting drill cuttings are removed from the borehole by the circulation of drilling fluid using the mud pump
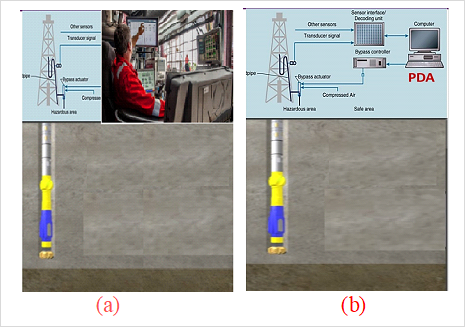
Fig. 1: Schematic of (a) Manual drilling system (b) Autonomous rotary drilling system (Trent, (2017).
Historically, rotary drilling is a complex process that required a highly trained human operator that continuously adjust the rotary speed and the drillstring decent velocity to maintain the desired weight on bit and acceptable drilling performance (Fig.1a). The selection of the operating parameter is based on intuition, experience or trial and error method. The redundancy in this system creates hidden time and sub-optimal operating condition with the consequence of increasing well construction cost and environmental footprint.
In recent time, availability of big data, high precision sensors control systems and machine learning can be used in automating the drilling system to improve performance by precise and optimal adjustment of parameters based on varying conditions using real-time measurement and models based on scientific principles as shown in (Fig.1b) The use of the autonomous drilling system will increase drilling speed, provide greater efficiency, and reduce equipment failure. The subsequent section discusses challenges facing the actualization of high fidelity autonomous rotary drilling system.
REAL-WORLD CHALLENGES AND OUR SOLUTIONS
In this section, we consider practical, real-world problems, which pose hard scientific challenges to autonomous drilling operations, explaining how it can be addressed through novel solutions or through novel application of existing methods. The categories of the different practical, real-world problems is shown in Fig.2 which include model for Drilling optimization problems, redundancy reduction in heterogenous rock, decision-making in the selection of optimized operating parameters and quality of experience in using the technique. Each of these challenges will be briefly described

Fig. 2: Categories of challenges facing the development of Autonomous Drilling System
A. Drilling Optimization Problems
Drilling cost is time dependent (Lyons and Plisga, 2004) and large saving in time and money could be achieved by reducing drilling time by raising the penetration rate and proactively preventing premature trip due to damage to drilling assembly. With the heterogenous rock environment and varying layers of hardness, it is sub-optimal to keep the same surface operating parameters for the entire section. Therefore, an autonomous system requires systems and techniques for determination of optimal operating parameters with corresponding optimal drill rate.
B. Redundancy Reduction in Drilling Process:
The manual drilling system are prone to dense, unpredictable adjustment of drilling parameter due to changes in drilling dynamics, different rocks and other process element. In these situations, a delay in identifying the redundant source causes hidden time. Redundancy reduction requires that the drilling system stays fully operational at technical limit. In the scope of these arguments, it proposed to take advantage of the latest control system and machine learning in the prediction of optimum drilling rate eliminating redundant elements such sub-optimal operating rate, human error and intentional delays.
C. Tuning Parameter for Autonomous Drilling System (ADS)
With the emergence of high-fidelity sensors and real-time drilling data measurement, downhole data is available that could be used to predict and optimize the drilling operation. Latest drilling mechanics data such as weight on bit (WOB), rotary speed (RPM), torque (TOR), flowrate (FLW) and pump pressure (Pp) measurement whilst drilling are uploaded via the Mud pulse telemetry (MPT). They have been employed in a wide range of sensing and acquisition applications, such as hole condition monitoring, directional control, environmental monitoring, tool surveillance Galzarano et.al (2014).
D. Quality of Experience
Quality of Experience (QoE) aims at assessing the quality perceived by a user of an autonomous drilling system while experiencing a service (e.g., penetration rate, drillstring dynamics, etc). Even though QoE is human centric, in general, due to exponential increase of services, it is not practical to employ humans to assess the services quality. Therefore, computational techniques capable of assessing the quality of those services such as humans do are needed. Liotta, A (2013).
Following the range of real-world problems, discussed, the aim of the research is to provide better insight on the complex interaction of rock-bit interaction and propose solutions addressing the fundamental challenges presented such as technique for real‐time prediction of ROP and rock UCS whilst drilling. It also proposed a decision-making model for autonomous drilling system for optimal parameters optimization.
RESEARCH METHODOLOGY
A Four-stage methodology was used in the study as illustrated in Fig.3: (i)) Model for ROP prediction and (ii) Model for rock UCS prediction and (iii) Decision support model and the adaptative WOB, RPM Model. A brief description on these four stages of the design is provided.
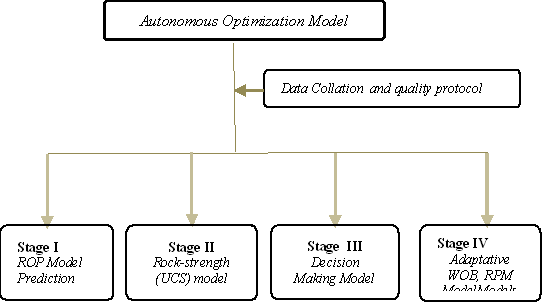
Fig. 3: Generalized workflow for Developing an autonomous drilling system
Stage 1: Model for ROP Prediction
This step looked at a comparative analysis of using empirical physics-based model (PBM) and data driven model to predict ROP using surface operating parameters. The PBM used includes the Maurer model (eqn.1). Bingham model (eqn.2) and Bourgogne and Young (eqn.3). Furthermore, four machine learning data driven models were tested.
![]() (1)
(1)
![]() (2)
(2)
Where k is drill ability constant, N is rotary speed (RPM), W is weight on bit (Klbf), Db is the diameter of the bit (in), and S is rock compressive strength (kPa) and a5 is a formation constant determined from the rock sample
![]()
Where, F1 defines the effect of formation strength, F2 represent the effect of compaction, F3 models an exponential increase in penetration rate with pore pressure gradient, F4 defines the effect of over balance on penetration rate, F5 defines the effect of weight on bit and rotary speed while F6 models the effect of rotary speed. F7 and F8 models the effect of fractional bit tooth wear.
Stage 2: Model for rock UCS prediction
In this section, models for estimating UCS values of the down hole formations while drilling using ML tools including the artificial neural network (ANN), Cat Boost (CB), Random Forest (RF) and Support Vector Machine (SVM). The developed models used drilling parameters as feed inputs to predict the output, UCS values. The ML was trained using sonic transit time data (Dt) which depends on formation porosity (Ø) and rock hardness. Equation 4 was used in estimation of UCS from sonic transit time measurements.
![]()
UCS is in (Psi) and t is travel time of P-wave in micro sec/ft
Stage 3: Decision support algorithm
The decision-making problem can be formulated as a Markov decision process (MDP), which can be written in terms of five-tuple (S, A, P, R, γ). The objective is to find an optimal policy, i.e., π∗, that maximizes the value of each state for a given action-state pairs. It can be expressed in the form of eqn. (5).
![]() (5)
(5)
Where is the immediate reward for acting at in state (St) and is the sum of discounted value of future reward from the decision
Stage 4: Adaptive WOB, RPM Decision support algorithm
This stage investigated an intelligent drilling optimization application that performs as an adaptive auto-driller using the selected machine learning (ANN) algorithms to improve on-bottom drilling performance and proactive eliminating drilling dysfunction such as stick-slip (Creegan and Jeffrey (2020). Fig.3 shows the schematic of feedback loop control method for autonomous drilling system. The optimal operating parameter from expert recommendation from the ANN when implemented
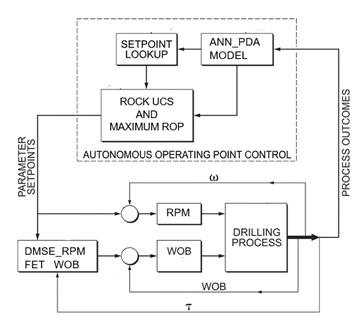
Fig. 4: Schematic decision-making process for autonomous operating parameter control
RESULTS
The summary of results of the ROP modeling and rock UCS predictions are shown in Table.1 and Table.2 respectively. Detailed discussion of the result is presented in the subsequent section.
Table 1: Performance Assessment of PBM and ML models for ROP prediction for Training and Test data
| Model | Model | Training (R2) | Test (R2) | RMSE |
| Physics Based Model (PBM) | Mauren | – | 0.50 | 30 |
| Bingham | – | 0.51 | 37 | |
| Bourgogne and Young | – | 0.70 | 28 | |
| Machine Learning (ML) | ANN | 0.98 | 0.95 | 7.8 |
Table 2: Performance Assessment of ML Algorithms on Training and Test Data for rock UCS Prediction
| Model | Training (R2) | Test (R2) | MAE | RMSE |
| SVM-R | 0.7473 | 0.6331 | 0.08 | 0.1053 |
| Random Forest | 0.8528 | 0.6754 | 0.06 | 0.099 |
| CatBoost | 0.9741 | 0.7012 | 0.06 | 0.095 |
| ANN | 0.85 | 0.77 | 0.035 | 0.0420 |
DISCUSSION OF RESULTS AND CONTRIBUTIONS
Overall, the key to addressing drilling optimization problems stated above depends on methods that combine Machine Learning with drilling optimization models, rather than deploying the PBM independently (Mocanu, 2016). To elaborate on this claim, a selection of contributions included
A. Predictive ROP models
In order to establish the best ROP model for the prediction of system performance. Comparative study was performed by comparing the performance of industry proven physics-based models with ML ANN model. The result showed that ANN models offer the best solution with dynamic functional association between input and output as the model learn by feature engineering from past event and the combination of both the physic-based model and machine learning techniques would improve the processing speed of the prediction by using the feature vector from the physic-based model in the machine learning modeling. Table.1 shows the predictive performance and Fig.5 shows the predicted versus actual ROP performance
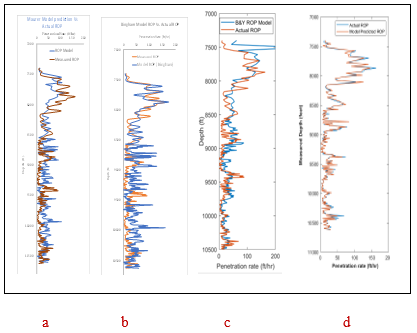
Fig. 5: Comparison plot of Model Predicted ROP Vs Actual ROP; (a) Maurer Model (b) Bingham model (c) Bourgogne and Young model (d) ANN model
B. Prediction of Rock strength and Maximum Achievable ROP
A proposed model for UCS estimation using drilling data was performed. Most models in literature used logging data, which may not be available while drilling especially in the top-hole section as logging while drilling (LWD) is not usually logged on most top-hole sections of wells. Even when the LWD is present in the bottom hole assembly (BHA), it is placed tens of feet above the bit and therefore does not reflect the instantaneous response of the rock-bit interaction that occurs when formation is been penetrated in real-time. This research showed that machine learning algorithm with basic real-time instantaneous drilling data can accurately predict rock UCS. The best model predictors were the ANN and the Catboast as shown in Table 2 and the worst predictor was SVR. Fig.6 shows the actual vs predicted UCS using the ANN model.
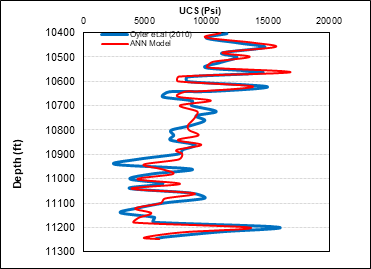
Fig. 6: Measured and predicted UCS value along borehole depth
The developed model for the calculation of instantaneous apparent unconfined compressive strength (UCS) of the rock at the bit. This method will remove the much uncertainty and subjectivity regarding rock strength and drillability. The new method enables improved decision whilst drilling in many areas including determination of formation tops, early detection of formation change and adjusted parameters and formation stratigraphic sequence. The model further provides an estimated maximum achievable ROP across the different heterogenous formation, enabling a comparable benchmark between the autonomous system performance with achievable technical limit.
C. Decision-making model for autonomous drilling system.
Decision-making in an unpredictable drilling environment is the focus of the model for decision-making of autonomous systems that presents significant challenges, especially when it is has a content of multi-variant optimization component like in rotary drilling system. This work investigated an intelligent drilling optimization application that performs as an adaptive auto-driller using Machine Learning (ANN) algorithms to improve on-bottom drilling performance and proactive elimination of drilling problems. Fig.7 shows the schematic of feedback loop control method for an autonomous system.
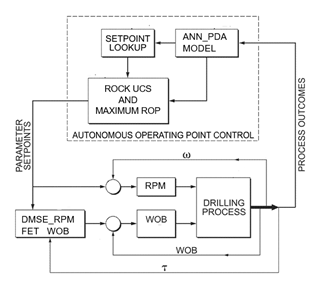
Fig. 7: Schematic Decision-Making Process for Autonomous operating Parameter Control
The drilling control system commonly referred as the predicted data-driven modeling ((PDA) determines the force applied to the rock by the bit and estimation of the descend termed the feed thrust (FET). Similarly drilling control system sets an angular velocity w in response to the force applied based on the rock-bit interaction. The study designed a reinforcement algorithm that critic the outcomes of the set-point operating system using a value iteration method thereby maintaining operating parameters that yields the optimum value in drill rate.
CONCLUSIONS
The study explored the fascinating opportunities that arise when machine learning is applied in solving drilling optimization problems. The applicability of such fundamental concepts in efficient ROP prediction, non-linear prediction of essential rock properties and decision-making process in drilling operation was investigated. The implementation of the holistic optimization approach will improve the overall drilling process and reduce the carbon footprint of oil and gas well construction. The model results showed that model performance of both the ANN and Catboost algorithm showed a good accuracy for a qualitative ROP and UCS prediction within acceptable margin of errors. The overall performance can be further improved by additional logging datapoints (e.g Sonic, NPHI, RBOH) whenever available. The new method enables improved decision whilst drilling in many areas including determination of formation tops, early detection of reservoir core points and formation stratigraphic sequence. The studied further revealed that an intelligent reinforcement algorithm can be used to iterative select the optimum operating parameters for an autonomous rotary drilling system using the value iteration of the Markov optimization process.
Author Contributions All authors contributed to the study’s conception and design. Material preparation, data collection, and analysis were performed by Kingsley Amadi and Ibiye Iyalla. All authors read and approved the final manuscript. Kingsley Amadi: Conceptualization, Methodology, Software, Investigation, Writing—Original Draft,
Funding: No funding was received to assist with the preparation of this manuscript.
Declarations
Conflict of Interest
The authors have no relevant financial or non-financial interests to disclose.
REFERENCES
- Akgun F (2002) How to estimate the maximum achievable drilling rate without jeopardizing safety. In: Proceedings of the SPE-78567 MS was Presented at Abu Dhabi International Petroleum Exhibition and Conference, Abu Dhabi, UAE, 13–16 October 2002. https://doi. org/ 10. 2118/ 78567- MS
- Alfreds RJ (1983) Rock mechanics.
- Galzarano, S, Giannantonio, R., Liotta, A and G. Fortino, (2014); A task-oriented framework for networked wearable computing. Automation Science and Engineering, IEEE Transactions on, vol. PP, no. 99, pp. 1–18, 2014.
- Bani-Mustafa, A.B., Ahmed KA, Alasba M. T., Alameen, M. (2021) Improving drilling performance through optimizing controllable drilling parameters. Journal of Petrol exploration and production.11:(3)1223-1232. https://doi.org/10.1007/s13202-021-01116-2
- Amadi, K.W., Iyalla, I., Alsaba, M., Prahbu, R., Waly, M., (2023); Development of Predictive Optimization Model for Autonomous Rotary Drilling System Using Machine Learning Approach. Journal of Petroleum Exploration and Production technology
- Amadi, K.W Iyalla, I., Alsaba, M., Prahbu, R., Waly, M., (2022); Continuous Dynamic Drill-off Test Whilst Drilling Using Reinforcement Learning in Autonomous Rotary Drilling System.2022 ADIPEC Technical Conference & Exhibition, Abu Dhabi. October 31st – November 3rd
- Liotta, A (2013); “The cognitive NET is coming,” IEEE Spectrum, vol. 50, no. 8, pp. 26–31, Aug. 2013
- Lyons, W., Plisga, G. and Lorenz, M., (2004). Standard Handbook of Petroleum and Natural Gas Engineering.
- Mocanu, D.C., (2016) “On the synergy of network science and artificial intelligence,” in Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence, IJCAI 2016, New York, USA, July 9-15, 2016.
- Šprljan, P., Pavkovic, D, Cipek, M, Klaic, M, Staroveski, T, Kolar, D. (2020); Automation Systems design and laboratory prototyping aimed at mature petroleum drilling rig retrofitting;27(1):229-236. https://doi.org/10.17559/TV-20180924173727
- Trent, J., (2017); With New Rig Software, Automated Drilling is Easier to Embrace. Journal of petroleum Technology. https://jpt.spe.org/new-rig-software-automated-drilling-easier-embrace
- Vega, M, T; Constantin, M, D and A. Liotta (2017); Unsupervised deep learning for real-time assessment of video streaming services,” Multimedia Tools and Appl